ความแปลกใหม่ในด้านเทคโนโลยีหุ่นยนต์สร้างแผนที่ของห้องและกำหนดเส้นทางการเคลื่อนไหวที่ดีที่สุด เนื่องจากวิถีการเคลื่อนที่ที่เหมาะสมมากขึ้นเวลาที่ใช้ในการทำความสะอาดจึงลดลงโดยไม่สูญเสียคุณภาพ ความเร็วสามารถเทียบได้กับความเร็วของเครื่องดูดฝุ่นที่อยู่กับที่ ในการทบทวนเราจะพิจารณาข้อดีข้อเสียและการทำงานของเครื่องดูดฝุ่นเราจะดูรายละเอียดว่ามันแตกต่างจากพี่น้องอย่างไรและทำไมจึงควรเลือกรุ่นนี้

ข้อมูลจำเพาะ

- น้ำหนัก - 3700 กรัม
- ขนาดเส้นผ่านศูนย์กลาง 34 ซม. สูง 9.9 ซม.
- ใช้พลังงานจากแบตเตอรี่ Li-lon 2600mAh
- กำลังไฟ 24 W.
- ชาร์จอัตโนมัติที่แท่นวาง
- เวลาในการชาร์จคือ 180 นาที
- ทำงานอัตโนมัติจากแบตเตอรี่เป็นเวลา 2 ชั่วโมง
- เสียงระหว่างการใช้งานไม่เกิน 65 dB
- รองรับพื้นที่ได้ถึง 150 ตร.ม.
- ปริมาตรของภาชนะสำหรับเก็บขยะ 350 มล.
- ควบคุมผ่านรีโมทคอนโทรลหรือแอปพลิเคชันในสมาร์ทโฟน
- ระบบนำทาง: lidar, กันชนเชิงกล, เซ็นเซอร์ความสูง IR, เซ็นเซอร์ตรวจจับสิ่งกีดขวาง
- การแจ้งเตือนด้วยเสียงและแสง
ออกแบบ

การออกแบบเป็นแบบมาตรฐาน - ตัวเรือนทรงกลมที่มีองค์ประกอบควบคุมที่ด้านบนและองค์ประกอบการทำงานที่ด้านล่าง แบบจำลองยังมีลักษณะเฉพาะของตัวเอง โดดเด่นด้วยกันชนด้านหลังเป็นเครื่องวัดระยะ IR เพื่อสร้างแผนที่ของห้อง นอกจากนี้ยังมีเซ็นเซอร์สำหรับการเปลี่ยนแปลงความสูงและวัตถุที่สัมผัส
ตัวถังเคลือบสีส้มเข้มขณะขับขี่สามารถมองเห็นได้ชัดเจนในห้อง ด้านบนมีพลาสติกสีใสตรงกลางเป็นระบบควบคุมที่ประกอบด้วยปุ่มสัมผัสที่แบ่งออกเป็นแปดปุ่ม ระบบควบคุมนี้ช่วยให้คุณสามารถเริ่มทำงานหรือหยุดการเคลื่อนไหวได้ นอกจากนี้ยังมีไฟแสดงสถานะการชาร์จแบตเตอรี่ข้อผิดพลาดและเวลาปัจจุบัน ทั้งหมดนี้เน้นด้วยสีส้มสดใส
มีความโดดเด่นตามรุ่นและจำนวนล้อ - ล้อรองรับคู่หนึ่งและล้อขับเคลื่อนคู่หนึ่งล้อขับเคลื่อนหนึ่งล้อที่ส่วนหน้าส่วนที่สองอยู่ด้านหลังของถังขยะ ล้อตั้งอยู่บนเส้นผ่านศูนย์กลางเดียวกันกับวงกลมสามารถเลี้ยวเข้าที่ได้เต็มที่ ล้อเลื่อนบานพับสปริงโหลดระยะ 26 มม. กันชนกลไกแบบสปริงจะวิ่งไปตามส่วนหน้าทั้งหมด

นอกจากไฟแสดงสถานะแล้วยังมีเสียงเตือนที่ไม่สามารถปิดได้ ขอบของลำตัวถูกลบมุมที่ด้านล่างเพื่อการลอยตัวที่ดีขึ้น นอกจากนี้ยังมีมุมบางส่วนที่ด้านบนเพื่อปรับปรุงทางเดินใต้เฟอร์นิเจอร์ ไม่มีหูหิ้วในเคส
ที่เก็บฝุ่นทำจากพลาสติกใส แต่ไม่สามารถมองเห็นโพรงจากภายนอกได้เมื่อเติมฝุ่นเข้าไปจะกำหนดปริมาณผ่านพลาสติกได้ยาก ภาชนะถูกถอดออกโดยการกดสลักที่ด้านหลัง การทำความสะอาดทำได้ง่ายและรวดเร็วด้านล่างและม่านพับกลับเป็นมุมกว้างซึ่งช่วยให้คุณเปิดตัวกรองและภาชนะทั้งหมดของช่องขยะ
ในส่วนด้านในมีองค์ประกอบตัวกรองเพิ่มเติมเล็ก ๆ สองชิ้น แต่การไหลหลักไม่ผ่านพวกเขา แต่ผ่านตัวกรองขนาดใหญ่หลักซึ่งเก็บฝุ่นจำนวนมาก แผ่นกรองขนาดใหญ่สามารถถอดประกอบได้โดยประกอบด้วยสองส่วนโดยชิ้นหนึ่งมีตาข่ายละเอียดทำจากพลาสติกอีกชิ้นหนึ่งมีแผ่นกรองที่ทำจากวัสดุเส้นใยพัดลมแอร์ติดตั้งอยู่ในตัวเก็บฝุ่นสามารถถอดออกได้ง่ายเพื่อให้สามารถล้างภาชนะด้วยน้ำได้ แต่หลังจากนั้นต้องเช็ดให้แห้งก่อนใช้
ที่ด้านล่างเป็นแปรงหลักช่องที่มีนั้นจะติดอยู่กับตัวยึดแบบบานพับโดยมีระยะชัก 6-7 มม. สำหรับการทำความสะอาดแปรงจะถูกนำออกจากร่อง ทางด้านขวาจะมีปุ่มสำหรับปิดการทำงานของหุ่นยนต์ นอกจากล้อและแปรงแล้วยังมีแผ่นสัมผัสที่ด้านล่างสำหรับเชื่อมต่อกับแท่นวาง ตัวสถานีชาร์จมีขนาดใหญ่พอและมีน้ำหนักมาก ประกอบด้วยสองส่วนแผ่นยางกันลื่นถูกนำไปใช้ที่ด้านล่างของส่วนล่าง มันค่อนข้างเสถียรและไม่ค่อยเคลื่อนไหวเมื่อติดตั้งหุ่นยนต์เพื่อเติมประจุ
การทำงาน
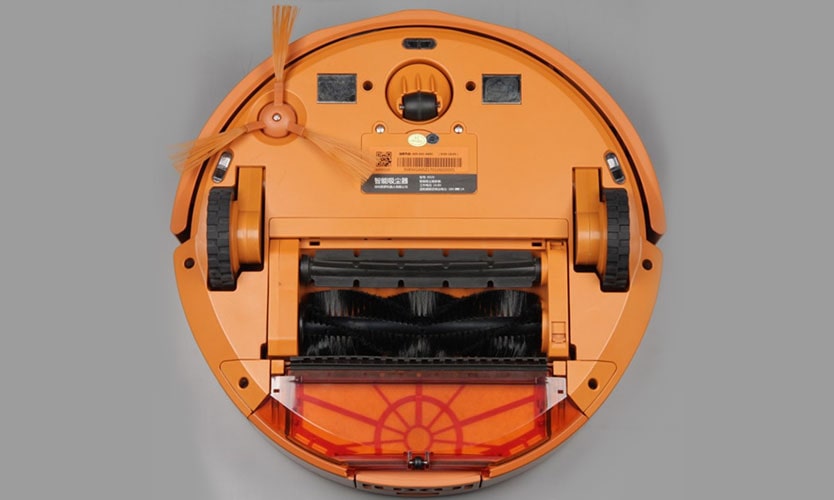
อัลกอริธึมการเก็บขยะทำตามขั้นตอนต่อไปนี้: แปรงด้านข้างจะกวาดเศษขยะไปที่กึ่งกลางโดยที่มีดโกนยางจะเคลื่อนย้ายเศษขยะขนาดใหญ่ไปยังช่องดูดและแปรงที่มีขนแปรงจะดึงเศษเล็กและใหญ่ มีฟันที่ขอบของแผ่นดูดซึ่งขจัดเศษสิ่งสกปรกออกจากขนแปรง ขั้นตอนที่สองของการทำความสะอาด - เศษที่เหลืออยู่บนพื้นหลังจากทางเดินของแปรงถูกดูดเข้าไปในช่องว่างระหว่างเครื่องขูดยางที่ส่วนล่างของตัวเก็บฝุ่นซึ่งพวกมันจะเกาะอยู่บนตัวกรอง อัลกอริทึมการทำงานดังกล่าวทำให้หุ่นยนต์เข้าใกล้เครื่องดูดฝุ่นแบบคลาสสิกมากขึ้นเนื่องจากเศษบางส่วนถูกดูดเข้ามาจากพื้นผิว
เครื่องดูดฝุ่นไม่เหมาะสำหรับเก็บของเหลวหรือทำงานในห้องที่ชื้นหลังจากสัมผัสกับความชื้นให้หยุดทำงานทันทีและเช็ดเครื่องดูดฝุ่นให้แห้ง ระบบนำทางของโมเดลนั้นขึ้นอยู่กับลิดาร์ซึ่งแตกต่างจากหุ่นยนต์คู่หูตรงที่ไม่ต้องขับรถเข้าไปใกล้สิ่งกีดขวางเพื่อตรวจสอบ การระบุสิ่งของภายในและผนังในระยะไกลช่วยให้หุ่นยนต์สร้างแผนที่ของห้องและเส้นทางการเคลื่อนที่ที่เหมาะสมที่สุด
เครื่องดูดฝุ่นจะกำหนดตำแหน่งของตัวเองและตำแหน่งของฐานได้อย่างแม่นยำเสมอหากเริ่มต้นจากเครื่องดูดฝุ่น อุปกรณ์อิเล็กทรอนิกส์จะจดจำสถานที่ที่เครื่องดูดฝุ่นผ่านไปแล้วสถานที่ที่ยังต้องทำความสะอาดพื้นที่ที่ยังไม่ได้สำรวจ คนหรือสัตว์ที่เคลื่อนไหวในบริเวณใกล้เคียงจะไม่รบกวนอัลกอริทึมการเคลื่อนที่ของหุ่นยนต์ ข้อเสียของการใช้ lidar คือความสูงของตำแหน่ง - จะเห็นเฉพาะวัตถุที่อยู่เหนือเส้นการติดตั้งทุกอย่างที่อยู่ด้านล่างไม่ได้กำหนด สำหรับสิ่งกีดขวางที่ต่ำเช่นนี้ร่างกายจะติดตั้งกันชนแบบกลไก
โมเดลมีให้เลือกใช้งานสามโหมดหลัก:
- อัตโนมัติ. ทำงานจนกว่าแบตเตอรี่จะหมดโดยกลับไปที่ฐานเพื่อเติมประจุ
- ท้องถิ่น. ใช้ทำความสะอาดเฉพาะบริเวณ การติดตั้งในพื้นที่ที่ต้องการทำได้ด้วยตนเอง คุณสามารถระบุพื้นที่ที่ต้องการบนแผนที่
- กำหนดเวลา คุณยังสามารถตั้งโปรแกรมตารางเวลาต่างๆซึ่งระบุเวลาและวันในการทำความสะอาด
ระบบควบคุมถูกนำไปใช้ในสามเวอร์ชัน:
- ผ่านปุ่มควบคุมบนแผงสัมผัส ที่นี่คุณสามารถดูโหมดการทำความสะอาดเวลาระดับแบตเตอรี่ข้อผิดพลาดที่เป็นไปได้ในการทำงาน
- จากรีโมทคอนโทรล ประกอบด้วยปุ่มสองปุ่ม - เริ่มในโหมดอัตโนมัติและกลับไปที่ฐาน การควบคุมจะดำเนินการในด้านการมองเห็นของอุปกรณ์เท่านั้น
- ผ่านแอพพลิเคชั่นในโทรศัพท์มือถือ. วิธีนี้มีฟังก์ชันการทำงานที่กว้างที่สุด ที่นี่คุณสามารถดูประวัติทั้งหมดของกิจกรรมของเครื่องดูดฝุ่นการสร้างแผนการทำงานและวิถีติดตามโซนที่ดำเนินการทำความสะอาดซึ่งมีการวางแผนไว้เท่านั้น ข้อเสียเพียงอย่างเดียวคือไม่มีภาษารัสเซียในฟังก์ชันการทำงานของแอปพลิเคชัน
อุปกรณ์

- พาวเวอร์ซัพพลาย.
- สถานีท่าเรือ
- แปรงข้างสำรอง
- ไส้กรองสำรองในถังเก็บขยะ
- รีโมท.
- เครื่องดูดฝุ่น.
- คำแนะนำ.
ข้อดีและข้อเสีย

จากการศึกษาฟังก์ชันที่นำเสนอเราสามารถเน้นข้อดีของโมเดลดังต่อไปนี้:
- การออกแบบที่เป็นต้นฉบับและโดดเด่น
- โครงสร้างภายในที่เหมาะสมของถังเก็บฝุ่น
- การสร้างแผนผังห้อง
- ความเร็วในการทำความสะอาด
- โปรแกรมการทำความสะอาดตามกำหนดเวลา
- การเคลื่อนตัวด้านหน้าของภายในให้ช้าลงเนื่องจากความเป็นไปได้ที่จะเกิดความเสียหายน้อยที่สุด
- กำลังเชื่อมต่อกับแอปพลิเคชันมือถือ
- แพคเกจการจัดส่งที่ดี
และข้อเสียดังกล่าว:
- ทิ้งเศษขยะไว้ตามผนัง
- การออกแบบถังขยะมีความซับซ้อนแม้ว่าจะมีการปรับปรุง
- ตรวจไม่พบสายไฟที่พื้น
- ค่อนข้างมีราคาสูง - ประมาณ 28,000 รูเบิล
- ขาดภาษารัสเซียในแอปพลิเคชัน
ดูเพิ่มเติม: เครื่องดูดฝุ่นสูงถึง 25,000 รูเบิล
