En nyhed inden for robotteknologi, det bygger et kort over selve rummet og bestemmer den bedste bevægelsesvej. På grund af en mere optimal bevægelsesbane reduceres tiden brugt til rengøring uden tab af kvalitet. Hastigheden kan sammenlignes med hastigheden på en stationær støvsuger. I gennemgangen overvejer vi fordelene, ulemperne og funktionaliteten ved støvsugeren, vi finder ud af i detaljer, hvordan den adskiller sig fra sine brødre, og hvorfor det er værd at vælge denne model.

specifikationer

- Vægt - 3700 g.
- Diameter 34 cm, højde 9,9 cm.
- Drevet af et 2600mAh Li-lon batteri.
- Effekt 24 W.
- Automatisk opladning ved dockingstationen.
- Den nødvendige opladningstid er 180 minutter.
- Autonomt arbejde fra batteriet i 2 timer.
- Lyden under drift er ikke mere end 65 dB.
- Håndterer op til 150 kvm areal.
- Beholderens volumen til opsamling af affald er 350 ml.
- Det styres via en fjernbetjening eller en applikation i en smartphone.
- Navigationssystem: lidar, mekanisk kofanger, IR-højdesensor, forhindringsdetekteringssensor.
- Advarsler om lyd og lys.
Design

Designet er standard - en rund kasse med kontrolelementer øverst og arbejdselementer i bunden. Modellen har også sine egne egenskaber. Det er kendetegnet ved en kofanger, bag den er en IR-afstandsmåler for at oprette et kort over rummet. Der er også sensorer til ændringer i højden og berøring af genstande.
Kroppen er mat, mørk orange, mens den kører kan den ses tydeligt i rummet. På toppen af det er der gennemsigtig tonet plastik, i midten er der et kontrolsystem bestående af berøringsknapper grupperet i otte. Dette kontrolsystem giver dig mulighed for at starte arbejde eller stoppe bevægelse. Der er også indikatorer, der viser batteriets opladning, fejl og den aktuelle tid. De er alle fremhævet i lys orange.
Det er kendetegnet ved modellen og antallet af hjul - et par støttehjul og et par førende hjul, et drivhjul i den forreste del, det andet bagpå en affaldsbeholder. Hjul er placeret på samme diameter med en cirkel, kan gøre en fuld drejning på plads. Hjulbeslag på fjederbelastede hængsler med 26 mm vandring. En fjederbelastet mekanisk kofanger løber langs hele forenden.

Ud over lysindikationen er der også lydalarmer, der ikke kan slukkes. Kanterne på kroppen er skråtstillet i bunden for forbedret flotation. Der er også en vis vinkel på toppen for at forbedre passagen under møblerne. Der er intet bærehåndtag på sagen.
Støvopsamleren er lavet af gennemsigtig plast, men dette gør ikke dets hulrum synligt udefra. Når det fyldes med støv, er det vanskeligt at bestemme dets mængde gennem plast. Beholderen løsnes ved at trykke på låsen bagpå. Rengøring er hurtig og nem, bunden og gardinet foldes tilbage til en stor vinkel, som giver dig mulighed for at åbne filteret og hele beholderen i affaldsrummet.
I den indre del er der to små ekstra filterelementer, men hovedstrømmen passerer ikke gennem dem, men gennem det store store filter, der opsamler hovedparten af støvet. Det store filter kan skilles ad, det består af to halvdele, den ene med et fint mesh lavet af plast, den anden med et filter lavet af fibermateriale.En luftblæser er indbygget i støvopsamleren, den kan let fjernes, så beholderen kan vaskes med vand, men derefter skal den tørres grundigt inden brug.
Nederst er hovedbørsterne, rummet med dem er fastgjort til et hængslet beslag med et slag på 6-7 mm, de gentager gulvaflastningen. Til rengøring fjernes børsten fra rillerne. På højre side er der en knap til at slukke for robotten. Ud over hjul og børster indeholder bunden kontaktpuder til tilslutning til dockingstationen. Selve ladestationen er stor nok og har betydelig vægt. Den består af to dele; skridsikre gummipuder påføres bunden af den nederste del. Den er ret stabil og bevæger sig sjældent, når robotten er monteret på den for at genoplade opladningen.
Funktionel
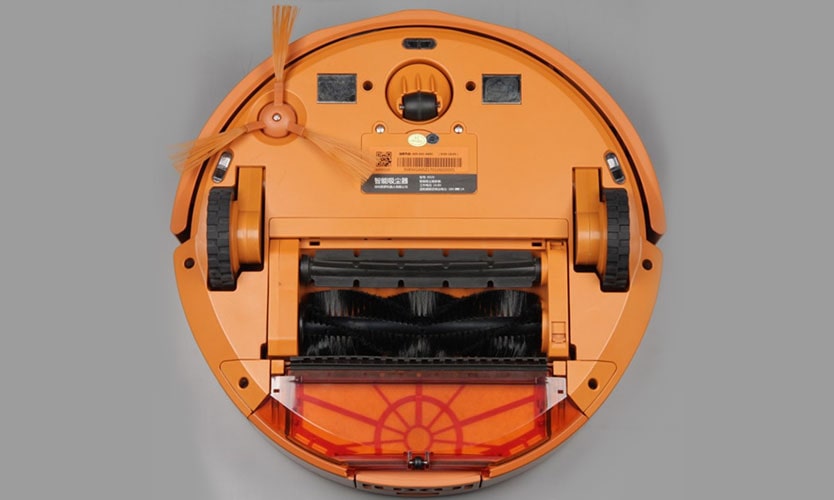
Affaldsopsamlingsalgoritmen følger disse trin: en sidebørste rager snavs op til midten, hvor en gummiskraber bevæger stort snavs ind i sugehullet, og en børste med børstehår opsamler store og små. Der er tænder på kanten af sugeklappen, der fjerner snavs fra børstehårene. Det andet trin til rengøring - affald, der er tilbage på gulvet efter børstens passage, suges ind i mellemrummet mellem gummiskrabere i støvopsamlerens nedre del, hvor de lægger sig på filteret. En sådan algoritme for arbejde bringer robotten tættere på klassiske støvsugere, da noget af affaldet suges ind fra overfladen på gulvet.
Støvsugeren er ikke egnet til opsamling af væsker eller arbejde i et fugtigt rum. Efter kontakt med fugt skal du straks stoppe med at arbejde og tørre støvsugeren grundigt. Modelens navigationssystem er baseret på en lidar, i modsætning til dets modparter behøver denne robot ikke at køre tæt på en forhindring for at bestemme den. Identifikation af indvendige genstande og vægge på afstand giver robotten mulighed for at oprette et kort over rummet og den optimale bevægelsesvej i det.
Støvsugeren bestemmer altid nøjagtigt sin egen placering og basens placering, hvis den blev startet fra den. Elektronik husker steder, hvor støvsugeren allerede er passeret, steder hvor der stadig er behov for rengøring, uudforskede områder. Mennesker eller dyr, der bevæger sig i nærheden, forstyrrer ikke robotens bevægelsesalgoritme. Ulempen ved at bruge lidar er højden af dets placering - den ser kun de objekter, der er over linjen for installationen, alt hvad der er under det bestemmer ikke. For så lave forhindringer er kroppen udstyret med en mekanisk kofanger.
Modeller fås i tre hovedtilstande:
- Auto. Arbejd, indtil batteriet er helt afladet, og vend tilbage til basen for at genoplade opladningen.
- Lokal. Bruges til at rengøre et bestemt område. Installation i det krævede område udføres manuelt. Du kan angive det ønskede område på kortet.
- Planlagt. Du kan endda programmere flere tidsplaner, der angiver tid og dage for rengøring.
Kontrolsystemet er implementeret i tre versioner:
- Via kontrolknapperne på berøringspanelet. Her kan du se den aktuelle rengøringstilstand, tid, batteriniveau, mulige driftsfejl.
- Fra fjernbetjeningen. Består af to knapper - start i automatisk tilstand og vend tilbage til basen. Kontrol udføres kun inden for enhedens synlighed.
- Gennem applikationen i mobiltelefonen. Denne metode tilbyder den bredeste funktionalitet. Her kan du se hele historien om støvsugerens aktivitet, opførelsen af en arbejdsplan og en bane, spore de zoner, hvor rengøringen blev udført, hvor den kun er planlagt. Den eneste ulempe er fraværet af det russiske sprog i applikationsfunktionaliteten.
Udstyr

- Strømforsyning.
- Dockstation.
- Ekstra sidebørste.
- Ekstra filter i affaldsbeholderen.
- Fjernbetjening.
- Støvsugere.
- Instruktion.
Fordele og ulemper

Efter at have undersøgt den foreslåede funktionalitet kan vi fremhæve følgende fordele ved modellen:
- Original og slående design.
- Optimeret intern struktur af støvbeholderen.
- Opbygning af et værelseskort.
- Rengøringshastighed.
- Planlagt rengøringsprogrammering.
- Sænkning af bevægelse foran indvendige genstande, som sandsynligheden for at beskadige dem er minimal.
- Opretter forbindelse til en mobilapplikation.
- God leveringspakke.
Og sådanne ulemper:
- Efterlader noget snavs langs væggene.
- Affaldsbeholderens design er kompleks, skønt den anses for at være forbedret.
- Registrerer ikke ledninger på gulvet.
- Ganske høje omkostninger - omkring 28.000 rubler.
- Mangel på russisk i ansøgningen.
Se også: støvsugere op til 25.000 rubler
