Uma novidade no campo da tecnologia robótica, ele constrói um mapa da própria sala e determina a melhor rota de movimento. Devido a uma trajetória de movimento mais otimizada, o tempo gasto na limpeza é reduzido sem perda de qualidade. A velocidade pode ser comparada à velocidade de um aspirador de pó estacionário. Na análise, vamos considerar as vantagens, desvantagens e funcionalidade do aspirador, vamos descobrir em detalhes como ele difere dos seus homólogos e porque vale a pena escolher este modelo.

Especificações

- Peso - 3700 g.
- Diâmetro 34 cm, altura 9,9 cm.
- Alimentado por uma bateria de Li-lon de 2600mAh.
- Potência 24 W.
- Carregamento automático na docking station.
- O tempo necessário para carregar é de 180 minutos.
- Trabalho autônomo da bateria por 2 horas.
- O som durante a operação não é superior a 65 dB.
- Lida com até 150 m² de área.
- O volume do recipiente para coleta de lixo é de 350 ml.
- É controlado por controle remoto ou aplicativo em smartphone.
- Sistema de navegação: lidar, pára-choque mecânico, sensor de altura IR, sensor de detecção de obstáculos.
- Alertas de som e luz.
Projeto

O design é padrão - uma caixa redonda com elementos de controle na parte superior e elementos de trabalho na parte inferior. O modelo também possui características próprias. É distinguido por um pára-choque, atrás dele é um telêmetro IR para criar um mapa da sala. Existem também sensores para mudanças de altura e objetos em contato.
O corpo é fosco, de cor laranja escuro, enquanto dirige pode ser visto claramente na sala. Na parte superior, há um plástico colorido transparente; no centro, um sistema de controle que consiste em botões de toque agrupados em oito. Este sistema de controle permite que você comece a trabalhar ou pare o movimento. Também existem indicadores que mostram a carga da bateria, erros e a hora atual. Todos eles são destacados em laranja brilhante.
Distingue-se pelo modelo e pelo número de rodas - um par de rodas de apoio e um par de rodas principais, uma roda motriz na parte dianteira, a segunda na parte traseira em um contentor de lixo. As rodas estão localizadas no mesmo diâmetro com um círculo, podem dar uma volta completa no lugar. A roda é montada em dobradiças de mola com curso de 26 mm. Um pára-choque mecânico com mola percorre toda a extremidade dianteira.

Além da indicação luminosa, também existem alertas sonoros que não podem ser desativados. As bordas do corpo são chanfradas na parte inferior para melhorar a flutuação. Também existe alguma angularidade na parte superior para melhorar a passagem por baixo do móvel. Não há alça de transporte na caixa.
O coletor de pó é feito de plástico transparente, mas isso não torna sua cavidade visível do lado de fora, ao encher com pó é difícil determinar sua quantidade através do plástico. O recipiente é destacado pressionando a trava na parte traseira. A limpeza é rápida e fácil, o fundo e a cortina podem ser dobrados para trás em um grande ângulo, o que permite abrir o filtro e todo o recipiente do compartimento de resíduos.
Na parte interna existem dois pequenos elementos filtrantes adicionais, mas o fluxo principal não passa por eles, mas pelo grande filtro principal, que coleta a maior parte do pó. O filtro grande pode ser desmontado, é composto por duas metades, uma com uma malha fina de plástico e a outra com um filtro de material fibroso.Um ventilador de ar está embutido no coletor de pó, pode ser facilmente removido, de modo que o recipiente pode ser lavado com água, mas depois disso precisa ser bem seco antes de usar.
Na parte inferior estão as escovas principais, o compartimento com elas é fixado a um suporte articulado com um curso de 6 a 7 mm, elas repetem o relevo do piso. Para a limpeza, a escova é removida das ranhuras. No lado direito existe um botão para desligar a energia do robô. Além de rodas e escovas, a parte inferior contém almofadas de contato para conectar à estação de encaixe. A própria estação de carregamento é grande o suficiente e tem um peso considerável. Consiste em duas partes: almofadas de borracha antideslizantes são aplicadas na parte inferior da parte inferior. É bastante estável e raramente se move quando o robô está montado nele para reabastecer a carga.
Funcional
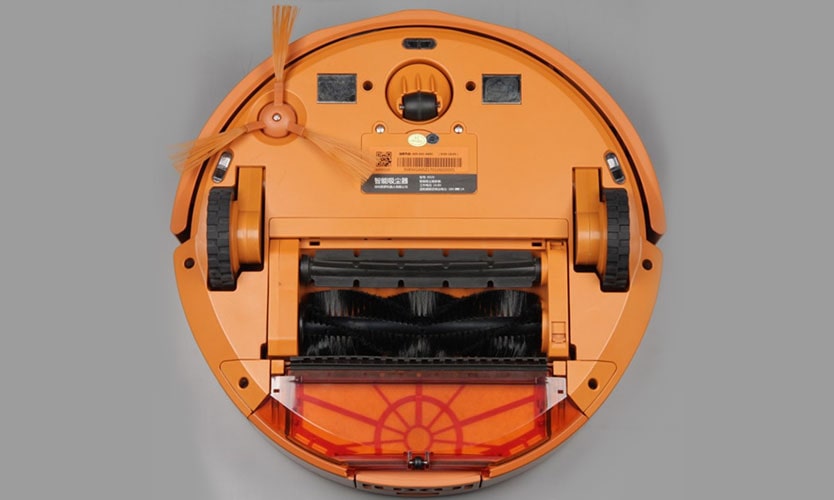
O algoritmo de coleta de lixo segue estas etapas: uma escova lateral leva os detritos até o centro, onde um raspador de borracha move os detritos grandes para o orifício de sucção e uma escova com cerdas apanha os grandes e os pequenos. Existem dentes na extremidade da aba de sucção que removem os resíduos das cerdas da escova. A segunda etapa da limpeza - os detritos que permanecem no chão após a passagem das escovas são sugados para o vão entre os raspadores de borracha na parte inferior do coletor de pó, onde se depositam no filtro. Esse algoritmo de trabalho aproxima o robô dos aspiradores de pó clássicos, uma vez que alguns dos detritos são sugados da própria superfície do chão.
O aspirador não é adequado para recolher líquidos ou trabalhar em recinto húmido; após o contacto com a humidade, pare imediatamente de trabalhar e seque bem o aspirador. O sistema de navegação do modelo é baseado em um lidar, ao contrário de seus congêneres, esse robô não precisa se aproximar de um obstáculo para determiná-lo. A identificação de itens internos e paredes à distância permite que o robô construa um mapa da sala e a rota ideal de movimento nela.
O aspirador sempre determina com precisão sua própria localização e a localização da base, se tiver sido iniciado a partir dela. A eletrônica lembra lugares por onde o aspirador já passou, lugares onde a limpeza ainda é necessária, áreas inexploradas. Pessoas ou animais se movendo nas proximidades não interferem no algoritmo de movimento do robô. A desvantagem de usar o lidar é a altura de sua localização - ele vê apenas os objetos que estão acima da linha de sua instalação, tudo o que está abaixo dele não determina. Para obstáculos tão baixos, o corpo é equipado com um pára-choque mecânico.
Os modelos estão disponíveis em três modos principais de operação:
- Auto. Trabalhe até que a bateria esteja completamente descarregada com um retorno à base para recarregar a carga.
- Local. Usado para limpar uma área específica. A instalação na área necessária é feita manualmente. Você pode especificar a área necessária no mapa.
- Programado. Você pode até programar vários horários, que indicam a hora e os dias de limpeza.
O sistema de controle é implementado em três versões:
- Por meio dos botões de controle no painel de toque. Aqui você pode ver o modo de limpeza atual, tempo, nível da bateria, possíveis erros de operação.
- Do controle remoto. Consiste em dois botões - iniciar no modo automático e retornar à base. O controle é realizado apenas no campo de visibilidade do dispositivo.
- Através do aplicativo no celular. Este método oferece a funcionalidade mais ampla. Aqui é possível conhecer todo o histórico da atividade do aspirador, a construção de um plano de trabalho e trajetória, acompanhar as zonas em que a limpeza foi realizada, nas quais é apenas planejada. A única desvantagem é a ausência do idioma russo na funcionalidade do aplicativo.
Equipamento

- Fonte de energia.
- Estação de ancoragem.
- Escova lateral sobressalente.
- Filtro sobressalente no recipiente de coleta de lixo.
- Controle remoto.
- Aspiradores de pó.
- Instrução.
Vantagens e desvantagens

Tendo estudado a funcionalidade proposta, podemos destacar as seguintes vantagens do modelo:
- Design original e marcante.
- Estrutura interna otimizada do depósito de pó.
- Construindo um mapa da sala.
- Velocidade de limpeza.
- Programação de limpeza programada.
- Diminuindo o movimento na frente dos itens internos, devido ao qual a probabilidade de danos a eles é mínima.
- Conectando-se a um aplicativo móvel.
- Bom pacote de entrega.
E esses contras:
- Deixa alguns detritos ao longo das paredes.
- O design do recipiente de resíduos é complexo, embora seja considerado melhorado.
- Não detecta fios no chão.
- Um custo bastante alto - cerca de 28.000 rublos.
- Falta de idioma russo no aplicativo.
Veja também: aspiradores de pó de até 25.000 rublos
